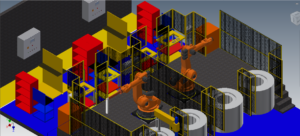
Para que o processo feito por uma célula robótica seja perfeito, é necessário que o projeto tenha um planejamento impecável, e que todas as situações sejam descritas e simuladas.
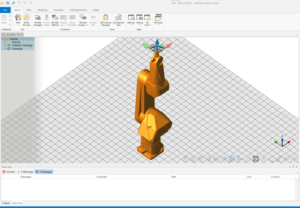
A Highpot Automation projeta e simula todos os componentes de uma célula robótica, desde o gradeamento até a ferramenta do sexto eixo.
O projeto mecânico de cada célula é feito no Autodesk Inventor, software 3D que conta com uma vasta gama de opções que auxiliam no desenvolvimento dos componentes mecânicos. Toda parte de layout, estações de entradas, estações intermediarias, castanhas, ferramentas, são feitas nesse software. Inclusive, muito dos 3DS dos robôs que as empresas disponibilizam em seus sites já vem com seu WorkSpace integrado, facilitando a definição da orientação base do robô em cada aplicação.
Com nosso vasto conhecimento em diversas marcas de robôs como Fanuc, Yaskawa, Staubli, Comau, ABB, KUKA, e Mitsubishi, é possível que façamos toda parte de programação e simulação de trajetórias em seus respectivos softwares, totalmente OFFLINE. Como por exemplo, o Staubli SRS (Staubli Robotics Suite) que nos permite simular, programar e até se conectar ao controlador em campo, com opções de controladores CS8, CS8C e CS9.
O projeto elétrico é feito no software QelectroTech, que tem uma vasta quantidade de componentes e possibilidades de edição, tudo dimensionado de forma correta por nosso time de engenharia. Também integramos diversos controladores lógicos programáveis e IHM’s aos robôs, dependendo da necessidade da aplicação.
Quer automatizar sua empresa? Conte conosco!